
如何在不改动核心机械与电路的前提下,通过外观设计,将一款精密却显粗糙的“实验室机械手”,转变为一件拥有极致质感、动态美感且值得信赖的高科技产品?
品物成功为灵巧手设计了高度集成的一体化外壳系统,使其从“实验装置”蜕变为具有国际水准的科技产品。在保持原有功能的前提下,实现了外观整体化、动态无干涉、结构紧凑化,并通过材料与工艺提升了质感,助力客户获得投资认可并实现量产落地。
跨越从“实验室原型”到“可信赖产品”的鸿沟
客户是一家拥有核心驱动技术的团队。他们成功开发了一款功能强大的机械手原型,五指可独立运动,抓取精准。然而,面对潜在投资方与早期用户时,他们收到了直接反馈:“技术很酷,但看起来太像粗糙的‘实验装置’了,缺乏产品该有的完整感和可靠性。客户带着明确诉求找到我们:在不动核心驱动与电路的前提下,为这只“灵巧手”设计一套全新的外壳系统(造型、结构、材料),让它从“原型机”蜕变为一件体现尖端科技与卓越品质的“商品”。这不仅是一次“美化”,更是一次系统的产品化定义。
设计思维以系统思维驾驭复杂约束
核心策略: 我们的目标不是跟随,而是通过设计建立新的品质标杆。体现在极致的完成度与质感;体现在独特的、一体化的科技美学表达;面对多目标、强约束的挑战,我们引入了系统化的设计思维框架.
1/包裹思维:将外壳视为高度集成的“第二骨骼”与“皮肤”,而非简单覆盖件。它须与内部机械骨骼协同工作,共同构成一个完整的生物-机械系统;
2/动态思维:设计从一开始就需同时考虑静态(展示)与动态(运动) 两种状态。美观必须在运动中依然成立,且运动本身应成为美学的一部分;
3/密度思维:在极限空间内,每一立方毫米的体积都承载着功能(保护、结构、运动)与情感(质感、视觉)的双重价值。设计即是对“功能密度”与“体验密度”的极致优化。
设计方法精准诊断——界定设计挑战
对现有原型与客户需求进行了系统性分析,将模糊的“不好看”拆解为一系列具体可解决的设计挑战.
1.形象挑战:裸露与割裂。内部走线、电机、转轴连接处暴露,视觉上杂乱且脆弱。拇指单元独立于手掌主体,衔接生硬,整体感差。
2.工程挑战:紧凑与可靠。市面同类产品普遍粗大,要求整体造型更小巧、更精致。内部空间有限,外壳要“紧贴”内部件,利用率极高。拇指指尖集成传感器,外壳需为其提供保护与精准定位。所有指关节在大幅度动态弯曲时,外壳部件之间绝不能产生干涉或碰撞。
3.体验挑战:感知价值。通过外观与质感,直观传递“可靠性”与“先进科技感”,让静态摆放的产品,也能暗示其内部的精密与动态潜能。
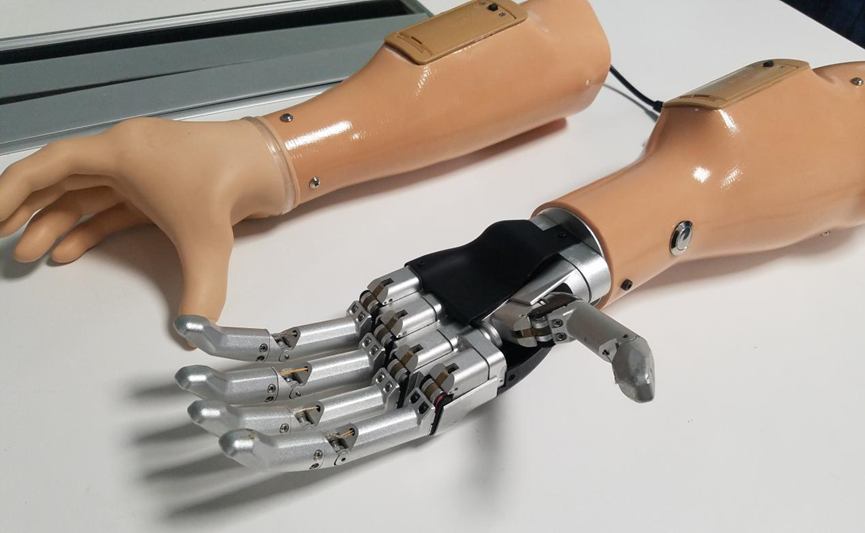
设计价值成果与价值:从原型到商品的蜕变
这款五指灵巧手,不仅树立了辅助康复领域产品化的典范,更为机器人灵巧手行业的演化提供了宝贵的设计与工程范式。它深刻诠释了工业设计在硬科技领域的高维价值!
对技术价值的提升:将卓越的内核技术,包装在了与之匹配的、具有国际水准的产品形态中,极大增强了向投资人、合作伙伴展示时的说服力与信心。
对市场感知的重塑:产品摆脱了“实验室工具”的粗糙印象,呈现出“高端智能装备”的完整商品质感,为后续市场定价和品牌建设奠定了视觉基础。
对工程目标的达成:在未改变内部核心的前提下,实现了造型的全面优化、结构的可靠保护、动态的完美流畅,以及极致的紧凑化目标。
设计的最终目标,是让产品(尤其是作为辅助康复器械时)外观自然、体验亲近,帮助用户有尊严地回归日常生活。
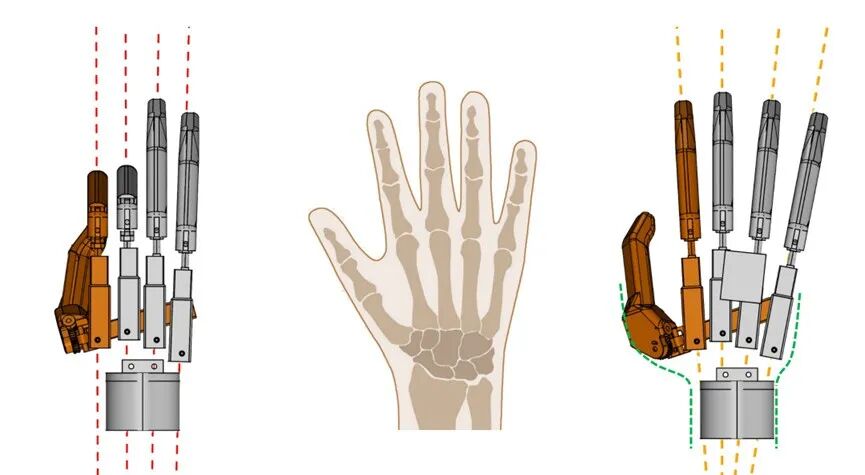
1.造型整合与家族化语言构建
挑战:拇指独立,破坏整体感。
解决方案:
不隐藏拇指的独立性,通过造型语言将其“归化”。
从手掌主体延伸出强有力的、带有生物肌肉感的包裹式曲面,将拇指底座自然地“拥裹”其中,视觉上形成有机连接。
为拇指单元设计专属的、与四指造型语言呼应的外壳,使其成为手掌造型一个有特色的组成部分,而非外挂附件。最终实现了“独立运作,一体呈现”的效果
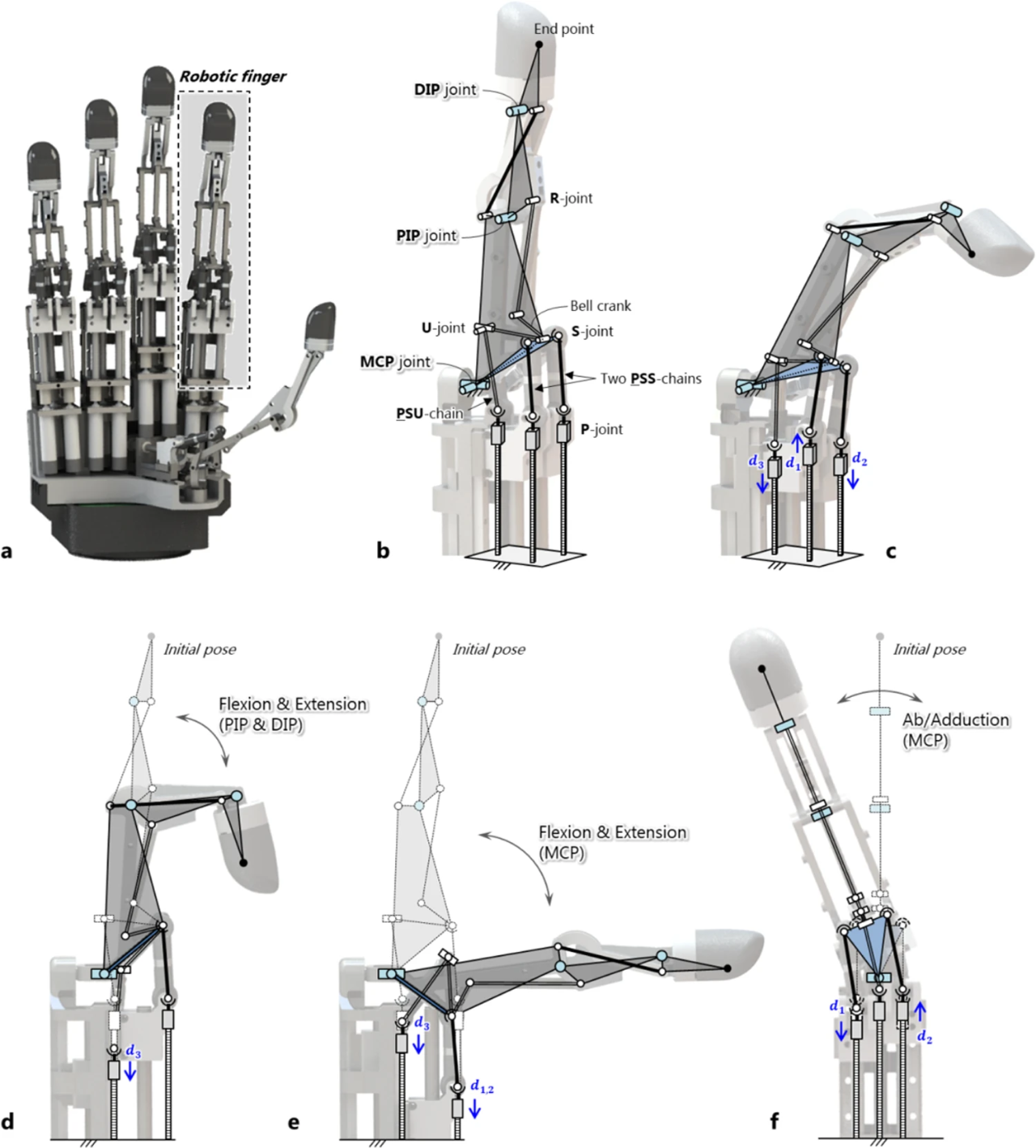
2.静动态矛盾的攻克:干涉分析与运动仿真
挑战:关节处外壳在弯曲时会相互干涉。
解决方案:
项目的核心难点,我们采用了严谨的工程化设计流程:
步骤一:运动包络空间分析。利用内部提供的关节运动参数,在三维软件中模拟出每个指节运动范围的极限包络体。
步骤二:拓扑优化与间隙设计。在确保外壳完全包裹内部机构的前提下,依据包络体对壳体进行“雕刻”,在关节连接处挖出精确的动态避让槽。同时,我们为相邻部件间设定了精确到0.5毫米的安全运动间隙。
步骤三:动态样件验证。通过高精度3D打印制作带有关节的活动样件,进行实物运动测试,反复迭代间隙与造型,确保在全行程运动中都流畅无阻。这解决了“动态展示件”的核心痛点。
3.极致紧凑化与内部集成
挑战:空间极小,要求整体小巧。
解决方案:
“紧身衣”式设计:外壳内壁根据内部电机、线束的精确形状进行拓扑匹配,实现零冗余空间的包裹,在外部尺寸上做到最小。走线通道一体化设计:将必要的内部走线路径预留在外壳的结构肋中,替代了原先外露的线缆,外观更整洁,也起到了保护作用
4.材料与质感定义:科技感与可靠性的触觉转译
挑战:如何通过材料体现“科技感”与“可靠性”。
解决方案:
摒弃了廉价感强的纯亮面或纯哑光塑料。
主体材料:选用高强度塑胶复合材料。其优点:质地坚硬,确保结构可靠性;成型稳定性好,能实现复杂曲面;表面处理潜力大。
拇指传感器:将压力、温度传感器无缝嵌入指尖硅胶套内,表面做微纹理处理以增强传感能力,视觉上无突兀;高耐性硅胶材质,既能保护内部精密传感器,又增加产品外立面的摩擦力,强化产品功能体验;
5.设计内核:形式服务于人本功能
一体化形态:用连续渐变的曲面语言有机包裹多个关节与电机,实现“外柔内刚”的视觉整体性与技术通透感。量产实现:团队持续深化生产可行性设计,助力团队完成从原型到批量生产的跨越,实现了高性价比的量产落地。这款灵巧手最终让众多截肢者以可承受的成本,获得了功能完备、外观自然、体验亲近的仿生手,真正回归日常生活。


 返回案例中心
返回案例中心
